Master’s Thesis: Interacting with the Human Eye: Gaze Vector Shape Based Recognition and the Design of an Improved Episcleral Venomanometer
Bridging Human-Robot Interaction and Clinical Instrumentation
MATLAB
SolidWorks
Computer Vision
Signal Processing
Medical Devices
A dual scope thesis featuring the development of a gaze commanded robotic interface and the iterative mechanical redesign of a medical venomanometer.
The Engineering Deep Dive
My Master’s Thesis explored the human eye through two lenses: as an output channel for control and as a biological system requiring precision measurement.
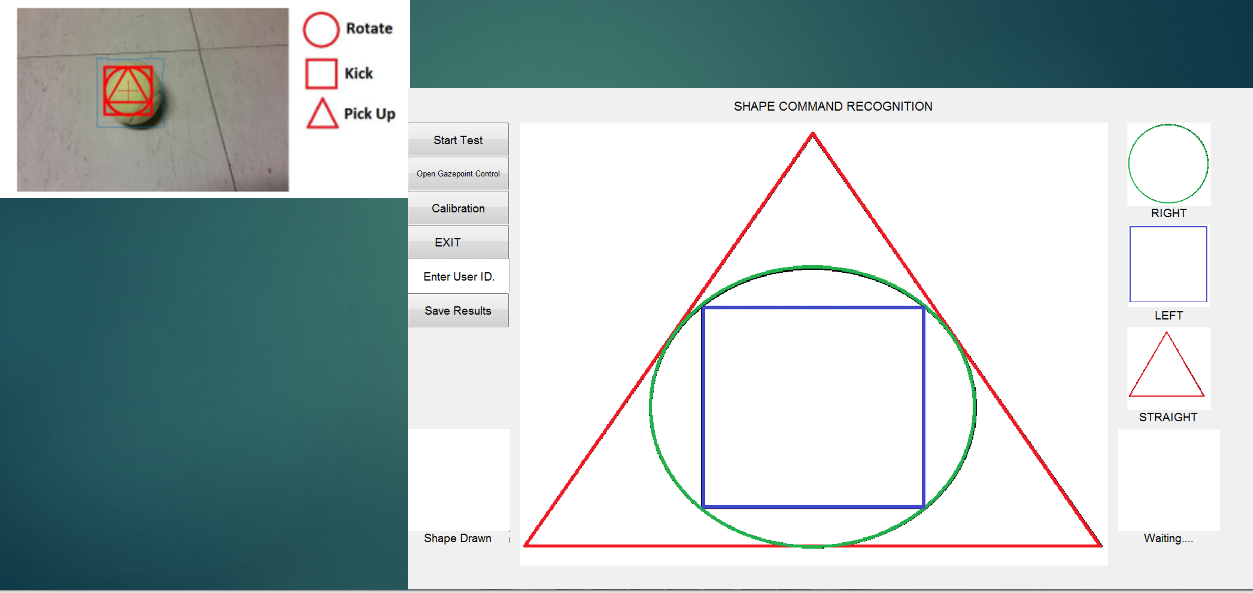
In the first phase, I developed a 'Gaze-Command' language. Using a 60Hz tracker, I built a MATLAB-based processing pipeline that filtered involuntary saccades and utilized Hough Transforms to identify geometric shape gestures. To bridge the gap between human intent and robotic latency, I implemented a stochastic ARMA(2,1) forecasting model to predict gaze paths in real time. This allowed for seamless control of both humanoid (NAO) and mobile robotic platforms.
In the second phase, I addressed a gap in Glaucoma research by redesigning the Episcleral Venomanometer. Over five iterations, I evolved the device from a high variability manual tool into a digital, video enabled diagnostic instrument. By integrating a Raspberry Pi Zero, custom optics, and a stabilized mic mount, I created a system capable of providing high-magnification ocular vein observation with significantly reduced technique-induced error.
The Technical Post Mortem
The unifying theme of this thesis was User Centric Design Whether it was creating a state-machine UI to prevent accidental robot triggers or refining the ergonomics of a microscope mount, I learned that the interface is just as critical as the underlying mechanics. The transition from Iteration 1 to Iteration 5 of the venomanometer taught me that simplicity and stability are the primary drivers of clinical accuracy.
Engineering Constraints
Solving for the 'Impossible' means navigating rigid physical and computational limits:
- Filtering biological 'noise' (saccades/blinks) for intent-based control.
- Standardizing measurement techniques to minimize clinical user-error.
- Miniaturizing a laboratory-grade device into a portable, battery-powered form factor.